Download Project Document/Synopsis


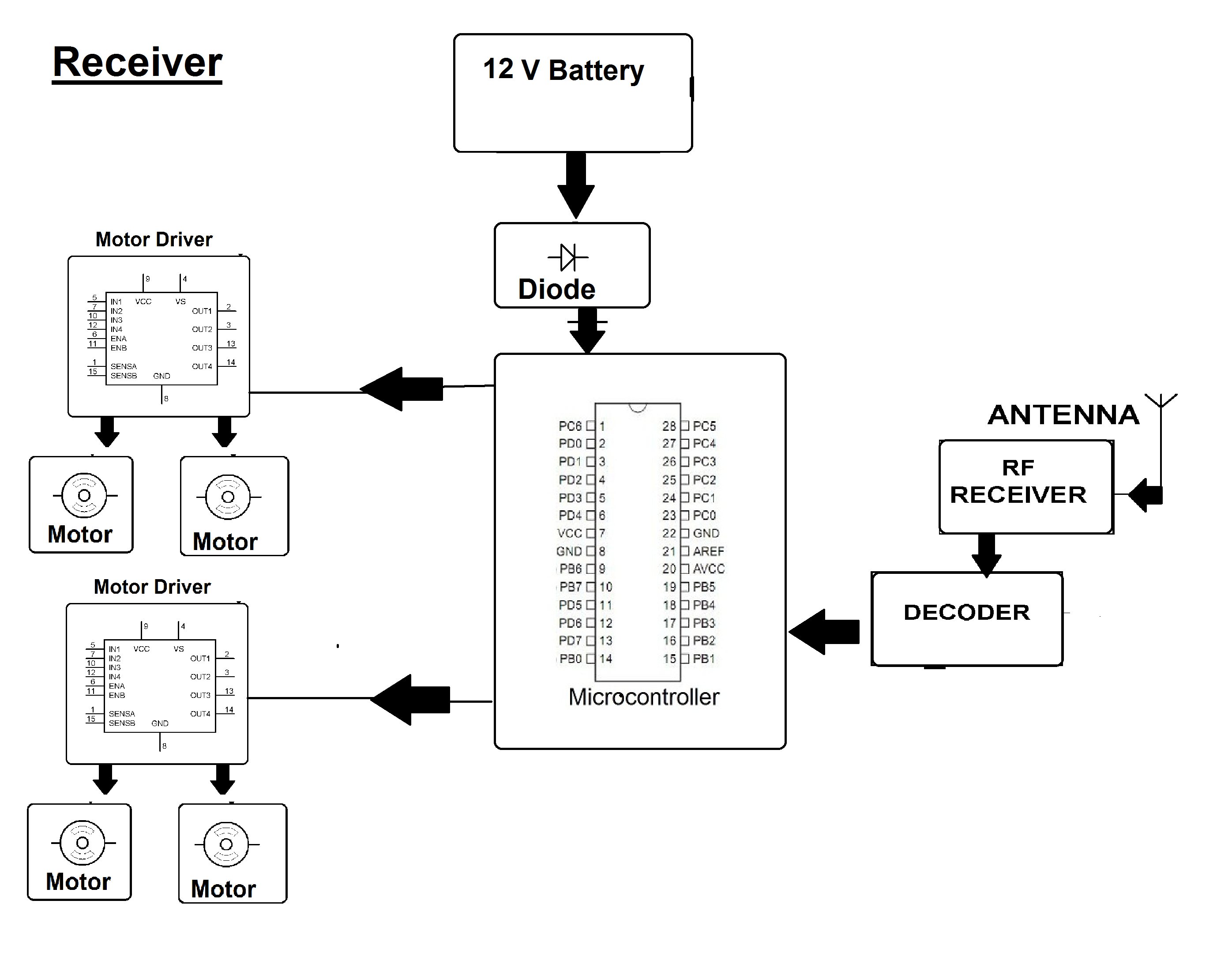
Spy robots are not good for spying on rough terrains due to their wheeled mechanisms. Robots and drones get stuck due to their inability to work on rough terrains. Here we propose a rough terrain beetle robot that can navigate with easy through jungles, hilly and rocky areas with ease. Its small size allows it to get go through rough terrains like a small animal crawling through the jungle with very little noise. The robot uses a crawling mechanism to achieve this task. The robot uses a microcontroller based circuit to control the motors and achieve desired movement. The robotic vehicle uses specialized climbers to climb and descend on hilly terrains. The climbers also allow it to crawl easily through bushes and grass. Also it allows the robot to cross rocky paths and obstacles. The robot is remotely controlled by a joystick remote. This allows the user to remotely control the directional movement as well as speed and power of the robot. The joystick uses rf transmit the commands to the robot remotely. The robot circuit consists of microcontroller based circuit that receives commands from the user and then instructs the motors through driver IC to achieve desired movement. Thus we here put forward a rough terrain small size beetle robot.


- Hardware Specifications
- ATmega328P AVR MC
- Robotic Chassis
- Beetle Legs
- 9V Battery
- RF Tx Rx
- Joystick
- DC Motor
- Motor Driver IC
- Vtg Regulator IC
- Resistors
- Capacitors
- Transistors
- Cables & Connectors
- Diodes
- PCB
- Software Specifications
- Arduino Compiler
- MC Programming Language: C
Block Diagram