Download Project Document/Synopsis


Landmines are explosive devices used in times of war and conflict to destroy or disable enemy targets. Landmines are typically concealed under the ground and usually triggered using pressure, thus detonating whenever a target steps over or drives over it.
Landmines are controversial contraptions and their usage is often debated due to their potential as indiscriminate weapons. Landmines can lie dormant and pose a threat to civilians even years after a war has ended.
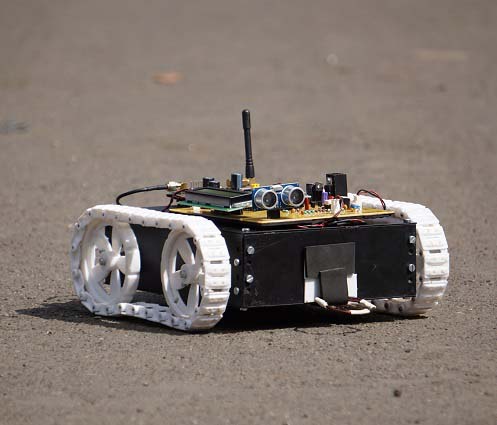
Demining refers to the process of removing landmines from an area. Demining can be both a military operation carried out during an active operation or a humanitarian effort conducted to clear an area of mines for civilian usage. This Landmine Detection Robotic Vehicle uses a metal sensing coil to detect mines hidden under the surface of the earth. It’s tracked design allows it to traverse across the roughest and wildest terrains. This Robot has been equipped with ultrasonic sensor to help it with obstacle sensing. Thus, making is capable to autonomously scan a particular area for hidden mines. This Robot is GSM based and allows the user to register themselves by merely giving a missed call.
This robotic vehicle detects landmines using a metal detector coil. The coil is mounted on a dual motor tracked robotic vehicle that surveys an area autonomously using an ultrasonic sensor for obstacle sensing. Once detected the vehicle transmits the GPS location of the landmine over an SMS to the registered phone number so that the mine locations can be mapped.
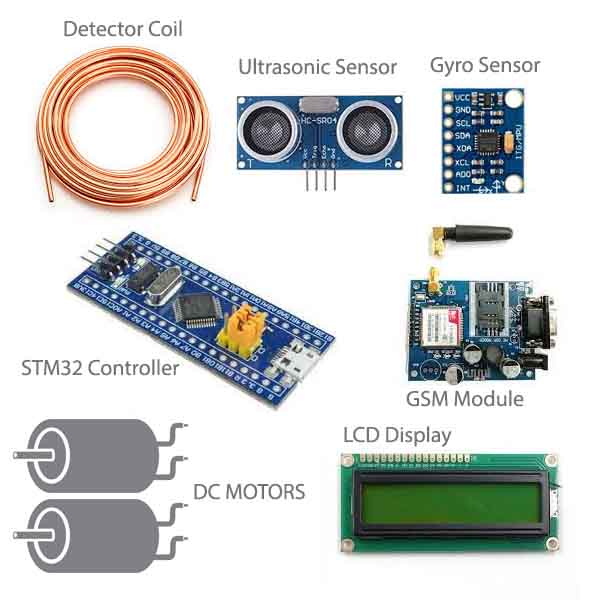
The system makes use of an STM 32 controller to achieve this operation. The Stm32 uses an ARM based processor to deliver high performance, real time capabilities and connectivity for various operations. We use a dual Motor drive using 2 x DC motors to drive the robotic vehicle. The Motors are attached to a tracked wheels for rough terrain operation. The system also consists of an ultrasonic sensor which when triggered in close range instructs the robot to change direction and sweep the area while avoiding obstacles.
The detector coil has electricity flowing through it that creates a magnetic field around the coil. As soon as a metal comes in proximity to the wire coil the a magnetic field is induced in the metal too which is detected by the detector. This signal is picked up by theSTM32 controller. The controller now uses a GSM module to transmit the GPS coordinates to a registered cell no via SMS messaging. Thus it allows a user to get GPS location data of all landmines in an area using this autonomous mine detector robotic vehicle.


- Hardware Specifications
- STM32F103C8T6
- Robotic Chassis
- DC Motor
- Detector Coil
- Ultrasonic Sensor
- Gyro Sensor
- Motor Driver IC
- Vtg Regulator IC
- IC Socket
- Metal Detector Coil
- GSM Module
- GPS Module
- LCD Display
- Crystal Oscillator
- Resistors
- Capacitors
- Transistors
- Cables and Connectors
- Diodes
- PCB and Breadboards
- LED
- Transformer/Adapter
- Push Buttons
- Switch
- IC
- IC Sockets
- Software Specifications
- Atollic Truestudio
- Programming Language: C
Block Diagram