Download Project Document/Synopsis
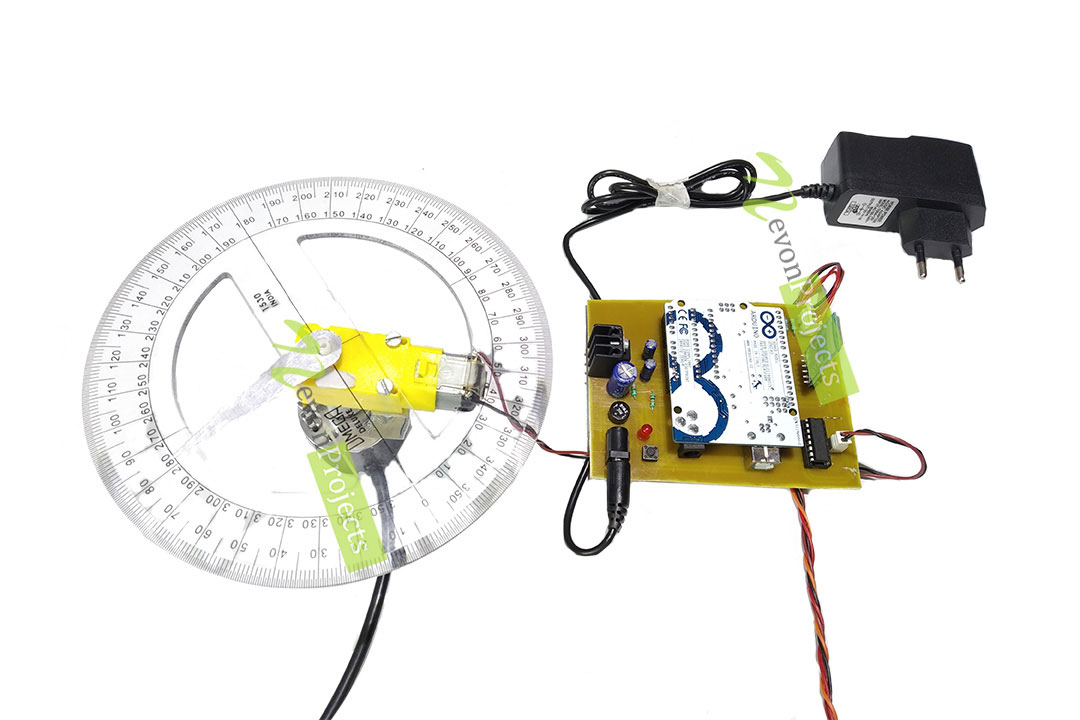


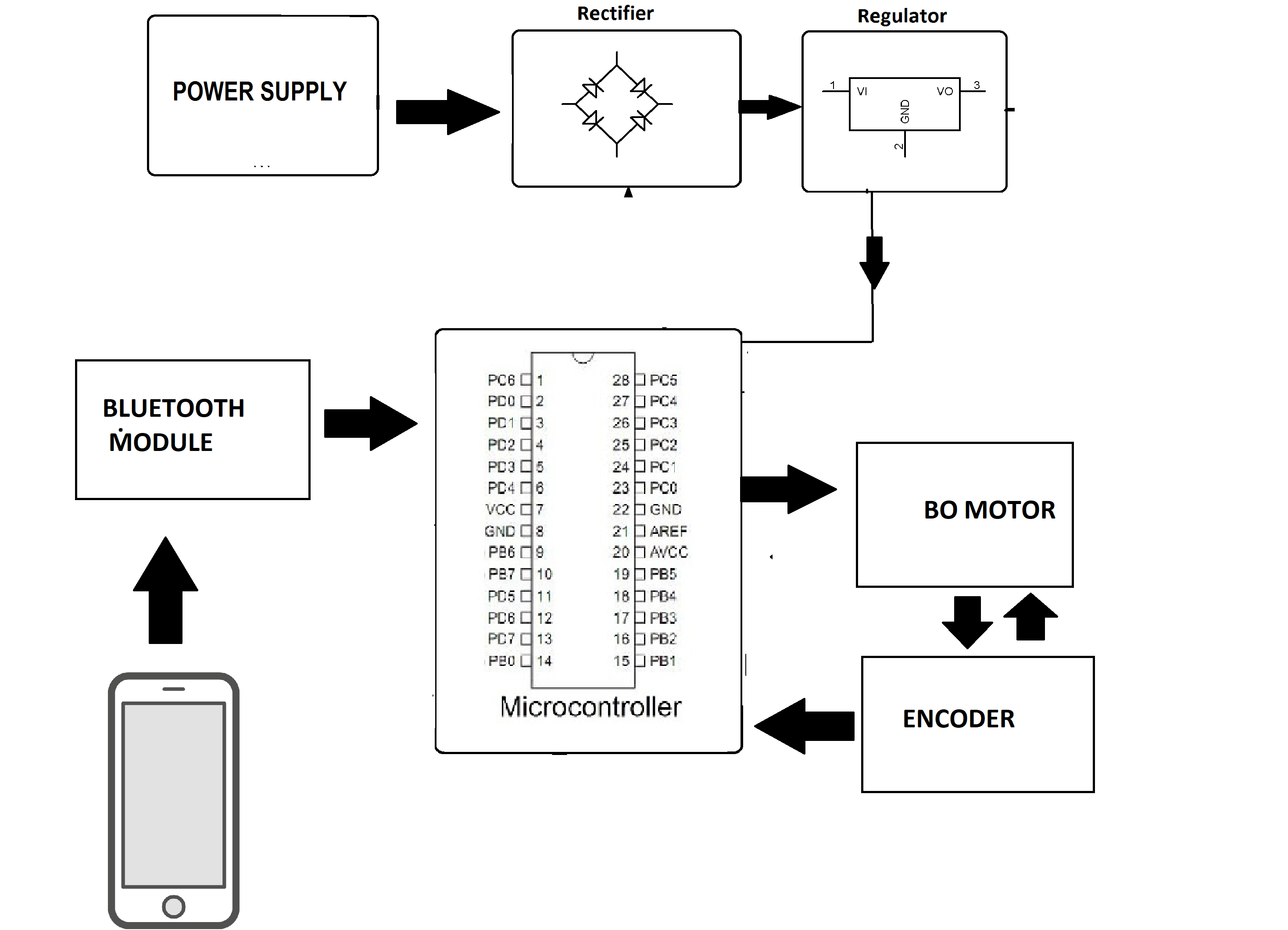
This motor position control system project aims at building an Arduino PID (Proportional derivative and integral calculation-based DC motor Position Control System). To achieve precise position control of the simple DC motor we have used Arduino and PID calculation. A double shaft simple DC gear motor is connected with the shaft of encoder on one side and on another side, is connected with a pointer. This pointer points to the angle marked on the protractor, an encoder is connected with Arduino on interrupt pins and DC motor drive by L293D motor IC, an HC-05 module is used to connect our system with android device. When we send an angle setpoint from the robot device Arduino receives the information and runs the Motor in the meantime encoder sends real-time position feedback to Arduino as per predefined calculation. Once encoder pulse matched with the requirement it means pointer reaches the desired position Arduino stops the DC motor at this potion. All the process is controlled by PID for sleek and clean motion.


- Hardware Specifications
- Arduino
- Dc motor
- Protractor
- L293d IC
- Optical encoder
- Crystal Oscillator
- Resistors
- Capacitors
- Transistors
- Cables and Connectors
- Diodes
- PCB and Breadboards
- LED
- Transformer/Adapter
- Push Buttons
- Switch
- IC
- IC Sockets
Block Diagram