Download Project Document/Synopsis


Robots has widely been used for a wide number of tasks. But a very promising use of robotics lies in goods transport. The problem in using robots transport is that they cannot climb stairs and cannot go through rough terrains. But if a robot can do that then the application of robotics are beyond our imaginations.
Most robots use either a wheeled or a tracked mechanism for mobility. While wheeled mechanisms offer impressive speed and a significant advantage in steering, this often proves to be difficult to use in offroad conditions and for climbing over obstacles.
While tracked robots offer a significant advantage in rough terrain, these still get stumped when it comes to climbing stairs.
Apart from the two tracks it uses for horizontal mobility, this Stair Climber Robot has dual tracked retractable arms that have been designed specially to help it climb stairs and large obstacles with ease.
These retractable arms can also be drawn back when not needed. Thereby, helping to optimise the robot’s energy consumption. Moreover, this robot also features an array of four gripper arms that allow it to hold and carry obstacles. These onboard gripping arms are actuated by an onboard pressure sensor and automatically clamp down when an object is placed between them. The gripper arms have been designed for soft object gripping to make sure that the object isn’t damaged.
The Robot offers following Features:
- Tracked design helps it negotiate even the roughest of terrains.
- Additional Dual retractable tracked arms help it with climbing stairs.
- Soft object gripping ensures the cargo isn’t damaged.
- Onboard pressure sensor for smart object gripping.
The robotic vehicle makes use of a motorized tracked arrangement coupled with a Gripper arrangement driven by a wireless remote controller. The wireless remote is used to transmit user movement commands to the tracked robot.
The robot receiver circuitry consists of an rf receiver connected with an Atmega328 microcontroller. The movement commands received by the rf receiver ate sent to the microcontroller for processing. The controller processes this data and operates 4 Motors to achieve the desired movement.
The robot uses 4 x DC high torque motors to operate the robotic vehicle. The motors are controlled by microcontroller via motor drivers to achieve the movement of vehicle. The robotic vehicle also an onboard robotic gripper to hold objects to be carried up and down the stairs.
Additionally the robotic vehicle has an onboard object gripper that allows it to hold objects while moving. This gripper arm is driven by 2 x DC motors for soft gripping. The robotic vehicle has a pressure/force sensor mounted on top. This allows the robot to only exert as much pressure needed to grip the object without damaging it.
Thus we get a fully functional stair climber robotic vehicle with a pressure sensing object gripper for transporting goods.


- Compenents
- 4 x high Torque motors
- 2 x Gripper Motors
- 2 x Gripper Arms
- Atmega Microcontroller
- Pressure Sensor
- RF Transmitter
- RF Receiver
- Robotic Wheels
- Rubber Tracks
- Mounts and Joints
- Resistors
- Capacitors
- Diodes
- Transistors
- PCB Board
- Robotic Chassis
- Supporting Frame
- Screws and Bolts
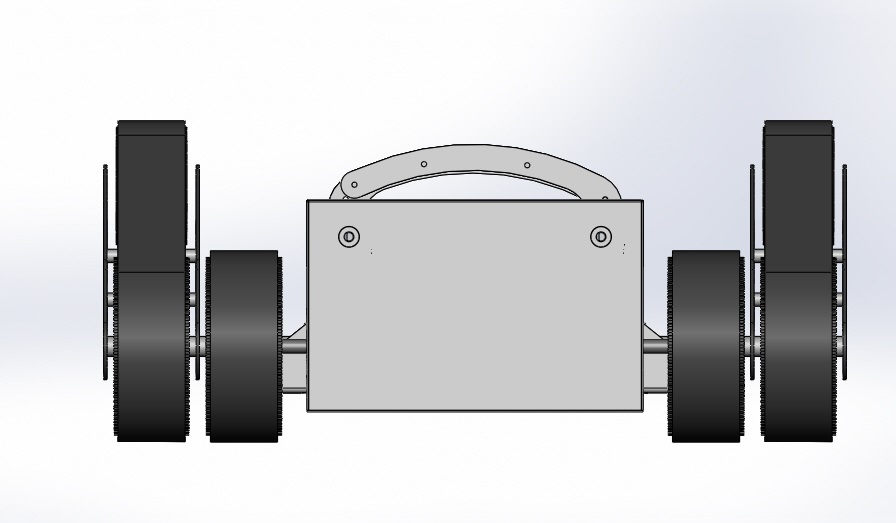
Front View
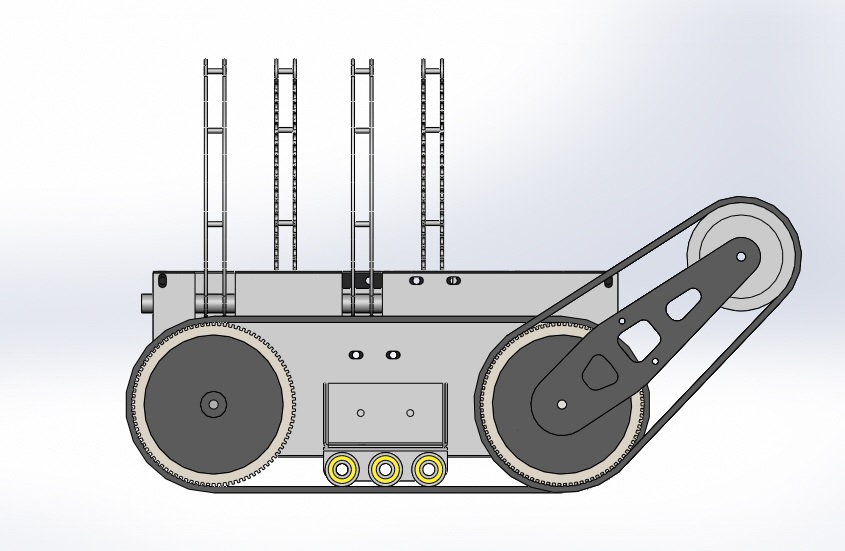
Side View
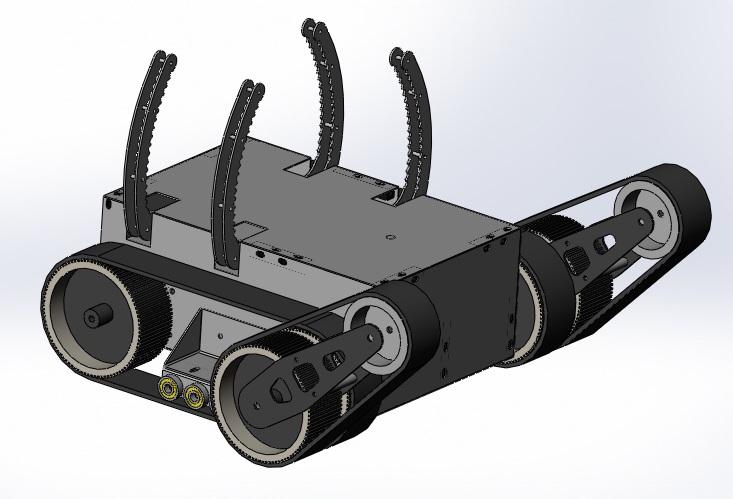
3D View