Download Project Document/Synopsis



Quadriplegia also known as Tetraplegia is a kind of paralysis characterized by loss of sensory and motor functions of all four limbs. One of the major challenges faced by individuals affected by quadriplegia is the inability of independent mobility. The loss of control in their arms makes it impossible for quadriplegics to use both traditional wheelchairs as well as regular motorized wheelchairs.
This head motion controlled wheelchair has been designed to address and alleviate the issue of independent mobility faced by individuals confined to a wheelchair.
Developed using a six motor mechanism, this wheelchair has been designed for a high torque, low speed operation. Thereby, enabling it to easily climb over ramps and slopes.
This system uses a helmet equipped with an accelerometer. The user wearing the helmet simply needs to tilt their head in the direction they wish to go. Thus, making this wheelchair intuitive and user friendly.
Then Hands Free offers following benefits
- Remote control operation makes hands free Operation.
- People with all types of disability may control it.
- 6 Motor high Torque Operation allows for easy operation on slopes.
- Purposely Slowed Down Wheelchair using Geared Motors to avoid fall.
The Wheelchair is made using 6 geared motors, a transmitter Helmet along with a Receiver Circuitry which are all integrated into a Metal frame Wheelchair. This allows for a strong wheelchair build that can allow for motion without wear and tear.
The Head movement of user are captured and transmitted by the controller helmet unit. The helmet unit consists of an accelerometer sensor that is used to record head movement tilting. The sensor values are processed by an atmega microcontroller which decides the tilt direction and this command is then transmitted to the receiver unit via RF wirelessly.
The receiver circuitry receives the movement commands via an RF receiver and sends them to the receiver microcontroller. The receiver also uses an Atmega microcontroller that processes the commands and then transmits these commands further to the motor drivers. Now the motor drivers are used to drive 6 DC geared motors to achieve front, back, left and right movements as per the commands received. Thus the wheelchair moves as per head motion commands without the need of any hand operated controller.


- Compenents
- Atmega Microcontrollers
- 6 x High Torque Motors
- RF Transmitter & Receiver
- Accelerometer
- Motor Drivers
- PCB Board
- Mini Electronics Components
- Wheelchair Seat
- Wheelchair Frame
- 6 x Wheels
- Supporting Frame
- Mounts and Joints
- Screws and Bolts
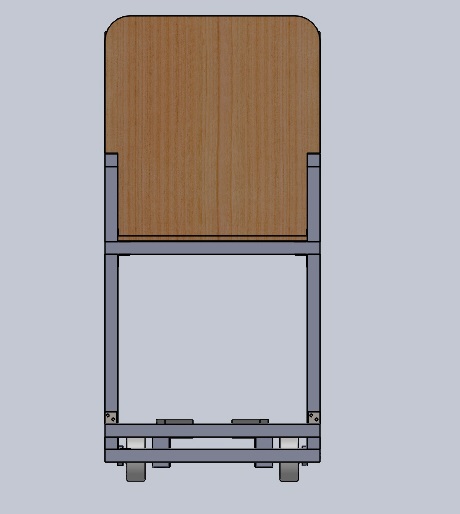
Front View
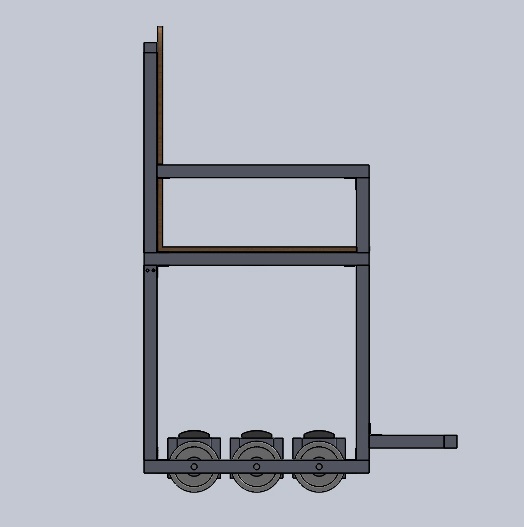
Side View
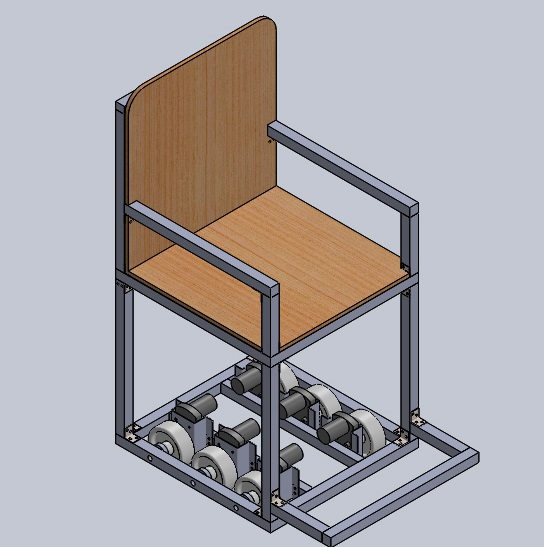
3D View