Download Project Document/Synopsis
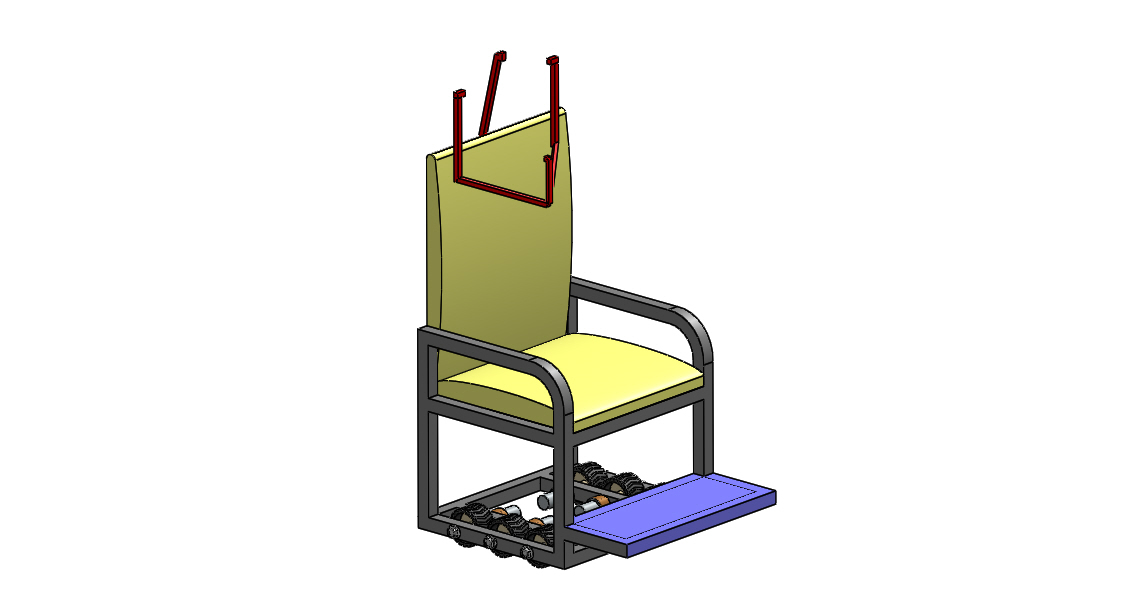


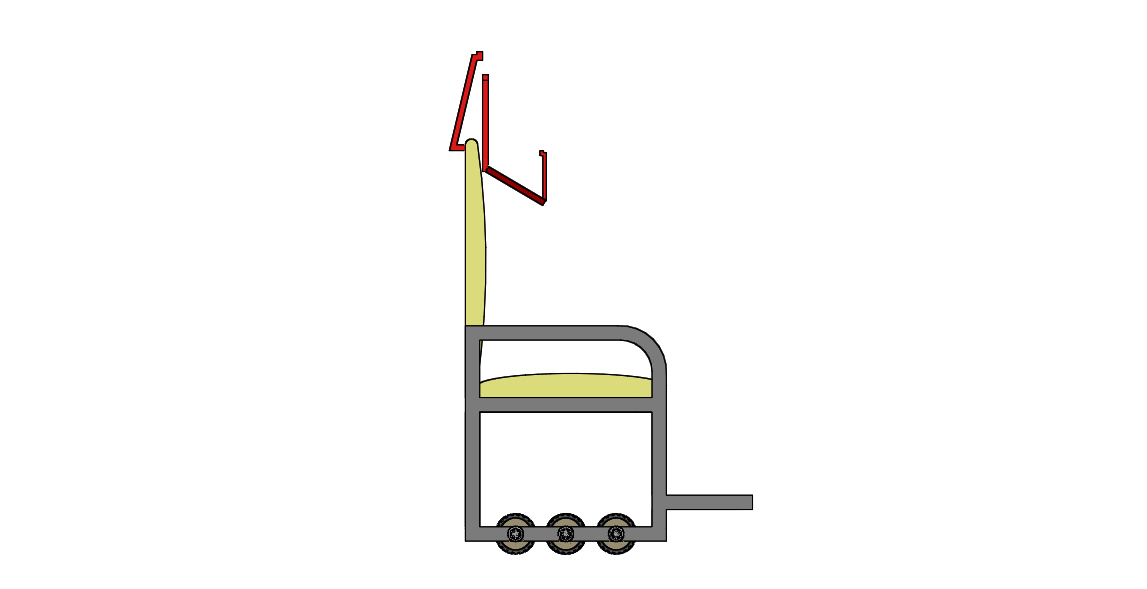
The problems faced by paralyzed and handicapped people are many among which the crucial one is independent mobility. They need external help from other people to execute and perform their daily activities. Electric and advanced wheelchairs are manufactured and designed with an aim to aid paraplegics. But such electric wheelchairs cannot by patients having high range of impairment like persons who cannot move any of their body parts except head. This robotic wheelchair project aims at designing a wheelchair that will work on the basis of head movement of the patient. For normal movement of wheel chair we use hand force. In this project we are using head movement for controlling the wheelchair motion. In this project 6 DC motors used for moving forward, backward and left and right. Motors are controlled by 4 SPDT switches. They are placed on the frame. The head movement will press the switches and so as the wheelchair will move as per directions given by switches.


- Components
- DC motors
- Metallic frame
- Wheels
- SPDT switches
Block Diagram