Download Project Document/Synopsis
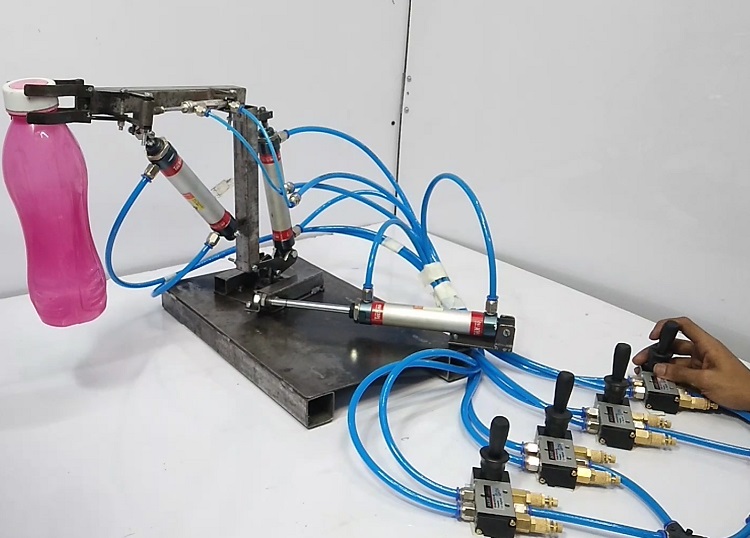


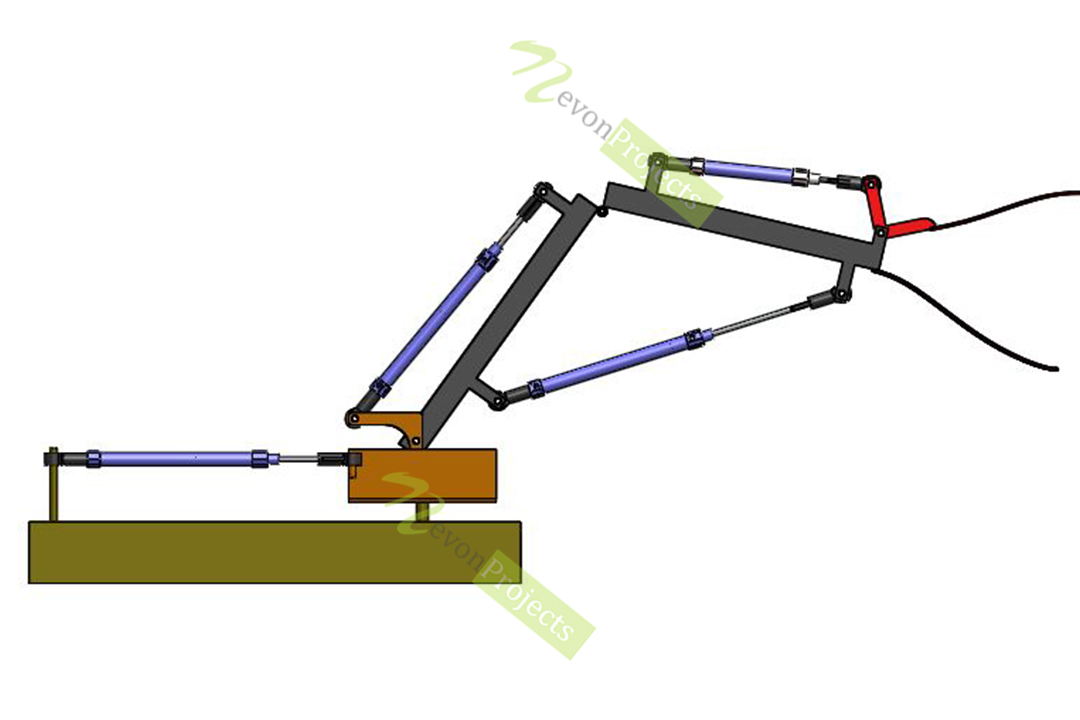
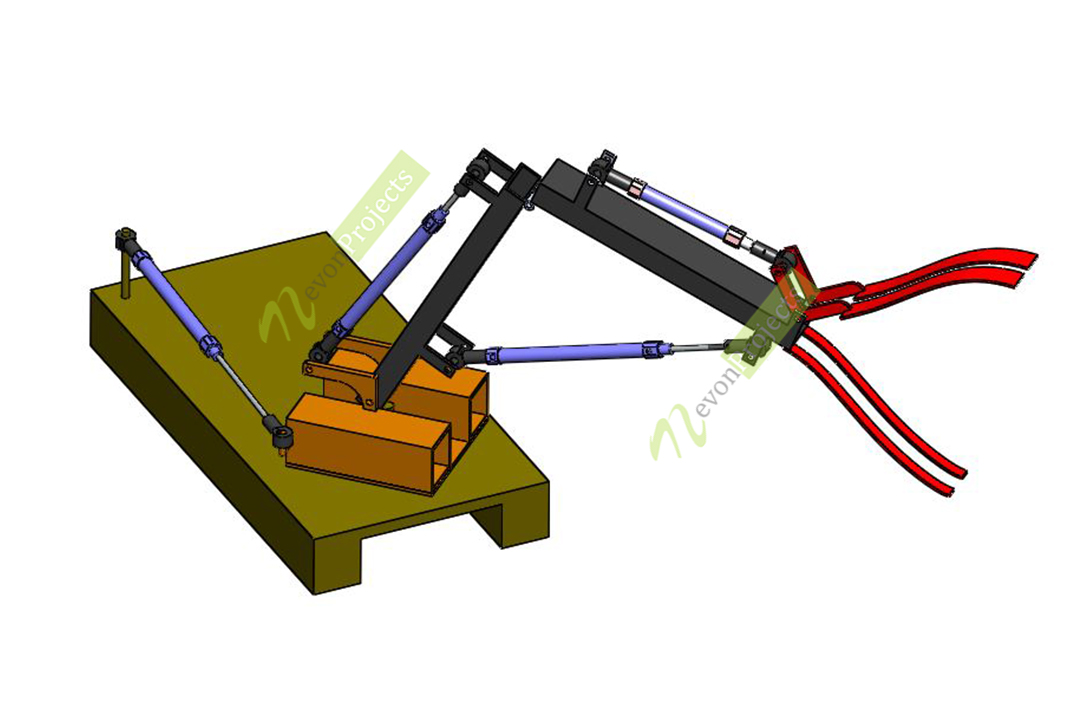
The system is a pneumatic powered metal made pick and place arm. It demonstrates how a pneumatic power can be utilized to achieve pick and place mechanism. The system makes use of 4 pneumatic actuators to achieve the purpose.
The robotic arm is controlled by 4 pneumatic valves. The valves control the air flow to the pneumatic actuators in order to control the movement of the cylinder stroke. The valves give a manual control to control over the entire arm movement.
The system uses a gripper arm operated by a small cylinder to operate the grip. It is controlled by the 4th pneumatic valve to control air flow to the gripper actuator and thus the gripping. The other valves work in coordination to achieve the complete arm movement held together by a series of linkages and connector rods.


- Parts
- Pneumatic Actuator
- Gripper Claw
- Pneumatic Valves
- Piping
- Solenoid valve
- Supporting Frame
- Linkages
- Mounts and Joints
- Screws & Bolts
- Advantages
- Improved Productivity
- Automated & Accurate Working
- Increased Efficiency
Block Diagram