Download Project Document/Synopsis
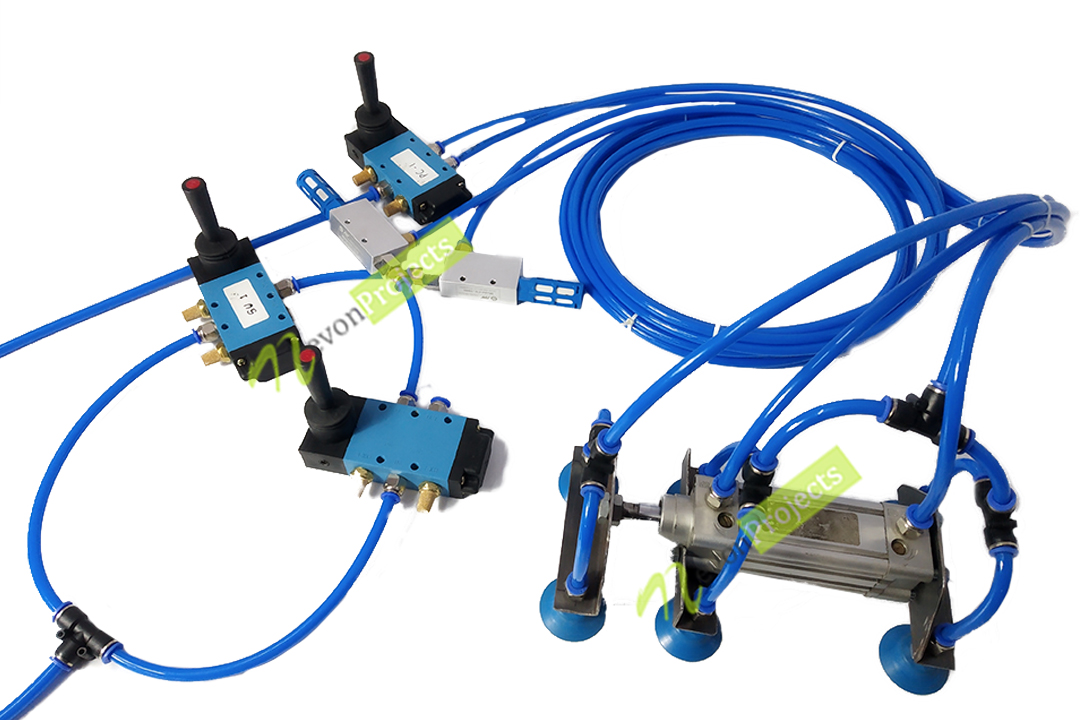


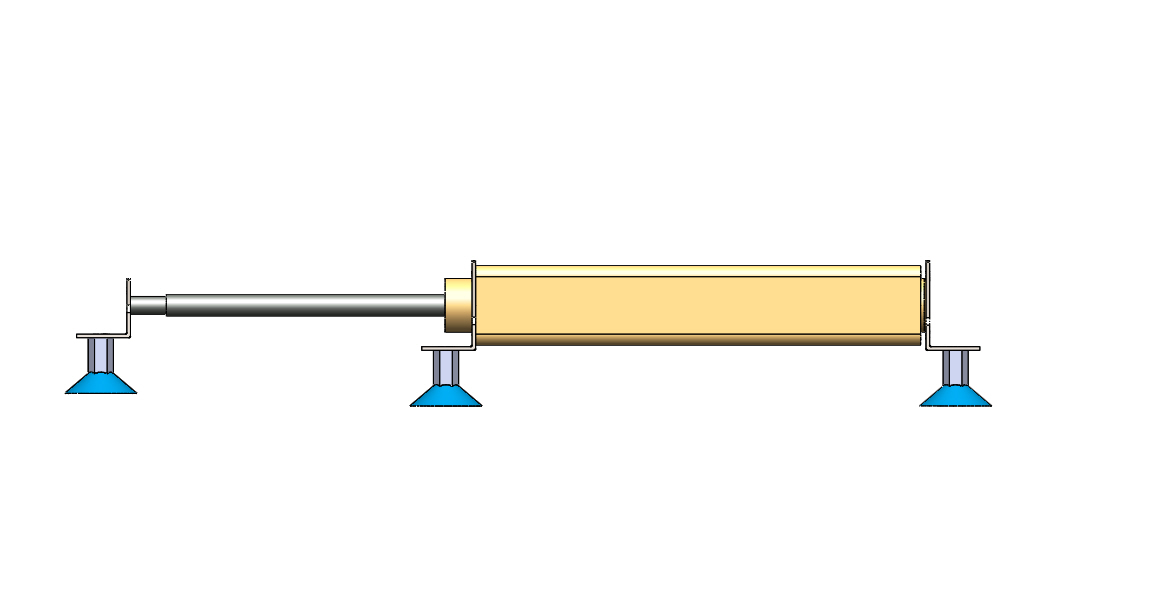
The climbing robot comprises of two limbs. Each limb has 4 suction cups. The suction cups are used to stick on to the surfaces. The air removal from suction cups is completed using a vacuum pump, controlled by solenoid valves. A microcontroller is used to control the relays that in turn switch electricity to solenoid valves. Suction pipes are used to connect solenoid vales to suction cups. We here use pneumatic power so as to develop a wise wall-climbing robot. The robot makes use of pneumatic power for movement additionally as suction so as to clutch the wall. The system may be a sensible mixture of pneumatic, mechanical and electronic circuitry that allows achieving this task. The robotic system consists of two pneumatic pistons so as to realize the movement. We make use of valves and drive them electronically so as to achieve the required movement. Also, we make use of suction cups at the end rods in order to achieve Vaccum based suction. We use vacuum ejector pistons and drive them through valves to operate the vacuum-based system parallel to the pneumatic systems in coordination in order to achieve the desired mechanism. As a result of the coordinated movements of those systems, we tend to get a totally operated pneumatic based mostly wall-climbing robot.


- Components
- Pneumatic Pistons
- Vaccum Cups
- Vaccum Ejectors
- Connecting Rods
- Electric Valves
- Pipes
- Joints & Screws
- Controller Circuitry
Block Diagram